Tecniche ottiche e computer vision per il monitoraggio ed il controllo qualità nell’industria conciaria
A cura di Ferraro Coppola, Attolico, Leone, Pagliarulo, Stella, Renò, d’Angelo c/o CNR – Leather Innovation Challenges 2025
Pubblicato sulla rivista CPMC n.2 (2021)
L’industria conciaria italiana è da sempre nel mondo sinonimo di alta qualità. La scelta dei materiali ed il controllo degli stessi rappresenta il punto di partenza per la realizzazione di prodotti riconosciuti come i migliori in un mercato globale a forte competizione. In questo quadro svolgono un ruolo importante, e in forte crescita, i controlli non distruttivi. I metodi di controlli non distruttivi (CND) sono definiti come un insieme di tecnologie atte a verificare processi e prodotti secondo opportuni requisiti di controllo qualità. Qualunque metodo di CND dovrebbe preferibilmente garantire alcuni importanti prerequisiti tecnici come ad esempio la non invasività e la possibilità di effettuare misure senza contatto a pieno campo. Esiste una grande varietà di
CND impiegati in settori molto differenti, dalla medicina ad esempio, al campo dei beni culturali. I CND tuttavia sono riferiti maggiormentete a processi e prodotti industriali.
A tal proposito, alcuni esempi di applicazioni possono essere: la verifica dell’integrità di materiali e componenti, la misura di caratteristiche geometriche, la rivelazione e valutazione di danni e difetti o anche il monitoraggio di parametri di processo. I diversi metodi di CND sono stati sviluppati per rispondere a diverse esigenze. Tra i tanti, le tecniche ottiche interferometriche, basate sull’utilizzo di laser, hanno trovato impiego per il controllo di materiali compositi e tessuti di varia natura. Questo tipo di tecnologia, grazie soprattutto all’evoluzione dei sensori, al miglioramento delle capacità di calcolo ed alla migliore efficienza e compattezza delle sorgenti laser, offre la possibilità di controlli e monitoraggio in tempo reale a pieno campo su superfici articolate come quelle costituite da oggetti in cuoio. Le tecniche interferometriche sono basate sul fenomeno dell’interferenza ed in particolare sul cosiddetto “speckle”. Lo speckle, che dà il nome ad une delle tecniche più utilizzate, ovvero l’Electronic Speckle Pattern Interferomery (ESPI), è un fenomeno che trae origine dalla natura coerente della luce utilizzata (ovvero il laser) che incidendo su una superficie scabra compie un salto di fase casuale senza perdere appunto la sua coerenza. Questa genera un effetto di interferenza che può essere costruttiva o distruttiva dando origine ad immagini composte da “puntini” scuri e luminosi. Questo modello di puntini viene sfruttato per rilevare variazioni delle superfici con una sensibilità inferiore alla lunghezza d’onda del laser impiegato (ovvero nel visibile di alcune centinaia di nm). Lo schema di base del setup
ottico è illustrato in figura 1.
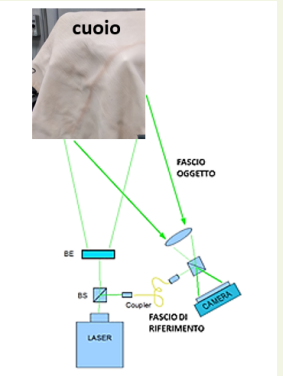
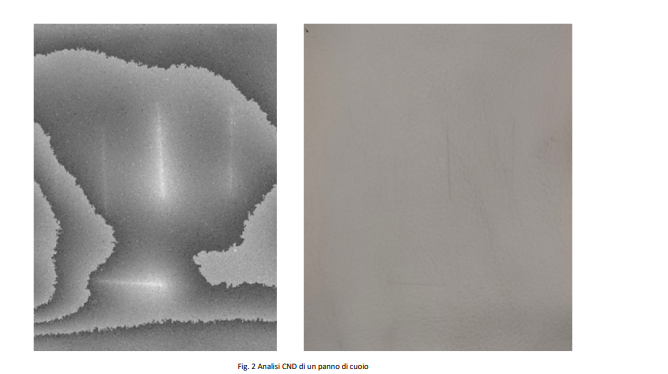
Se l’oggetto da esaminare è sottoposto ad una perturbazione, ad esempio attraverso un riscaldamento, cambia le sue caratteristiche geometriche e di conseguenza il modo in cui riflette la luce ovvero il suo speckle. Il confronto digitale tra i diversi speckle porta alla creazione di una immagine che mostra una serie di frange sovrapposte sullo schermo alla superficie in esame. Osservando la forma e la direzione delle frange è possibile evidenziare le discontinuità della superficie causate da
danni come tagli o incisioni, discromie della pelle, graffiature o arricciamenti Un esempio di valutazione di un panno di cuoio (destra) è mostrato di seguito dove dall’immagine elaborata delle frange (sinistra) è possibile evidenziare la presenza di graffi e tagli appena visibili sulla superficie del cuoio.
In aggiunta alle tecniche basate su interferometria si affiancano le tecniche di computer vision, che si basano sulla acquisizione ed elaborazione di segnali e immagini a diverse lunghezze d’onda, dal visibile fino all’infrarosso (NIR, SWIR etc…). Più in generale un sistema di visione artificiale è un insieme di hardware e software impiegato per dotare una macchina
di funzioni tipiche della visione umana. L’hardware utilizzato per l’imaging bidimensionale prevede l’utilizzo di telecamere, basate su sensori CCD o CMOS, che possono essere:
a) lineari, che acquisiscono una singola linea per volta, ma possono operare acquisendo un elevato numero di linee per secondo e con elementi fotosensibili tendenzialmente grandi, ma che necessitano di un sistema di movimentazione e trigger esterno ausiliario per la formazione di una immagine 2D;
b) frame, che acquisiscono direttamente una immagine bidimensionale (2D), e operano a velocità più contenute rispetto alle lineari e con dimensione del pixel che può essere anche particolarmente piccola.
Le telecamere possono acquisire un numero variabile di canali: uno nelle telecamere monocromatiche, tre nelle telecamere a colori (Red, Green, Blue), molti di più nelle telecamere multi-spettrali o iperspettrali. In base alla loro sensibilità alle diverse lunghezze d’onda, i canali possono riguardare lo spettro del visibile, l’infrarosso (vicino o lontano), o ampi intervalli di frequenze come accade nelle tecniche iperspettrali, che associano a ciascuno dei numerosi canali una specifica banda molto ristretta di lunghezze d’onda. La scelta del tipo di sensore dipende dal tipo di comportamento o difetto che si desidera evidenziare e dalle condizioni nelle quali è possibile acquisire le immagini. Nell’industria conciaria, ma ciò è vero anche in tutte le applicazioni industriali, è necessario rendere le operazioni di acquisizione ed elaborazione dei dati operative in linea, per cui vengono impiegati spesso sistemi robotici specificamente progettati per la manipolazione, la scansione e l’analisi dei prodotti in linea.
Tra questi sistemi rientrano i veicoli mobili autonomi (AGV), che possono operare autonomamente per la movimentazione dei sensori e di bracci robotici a N gradi di libertà: essi possono essere utilizzati sia per manipolare i prodotti, che per posizionare i sensori in modo da poter ispezionare anche aree molto grandi.
A livello software, infine, un sistema di visione deve essere in grado di analizzare i dati acquisiti allo scopo di estrarre informazione rilevante, in questo caso la presenza e l’eventuale caratterizzazione di un difetto. Storicamente, l’analisi delle immagini è stata effettuata definendo, estraendo e identificando particolari caratteristiche distintive di un prodotto (le cosiddette feature), allo scopo di analizzare configurazioni di colore, di struttura superfice o comunque regioni omogenee e non dell’immagine. Una volta estratte le feature, un algoritmo di classificazione può riuscire a riconoscere quelle zone dell’immagine che presentano un difetto o meno, basandosi proprio sui valori numerici delle caratteristiche estratte. In questo contesto, negli ultimi anni l’avvento delle tecniche di deep learning, una famiglia di modelli di intelligenza artificiale particolarmente efficaci per l’analisi delle immagini, ha permesso di affrontare i problemi di classificazione (e quindi anche i CND) con un nuovo approccio basato su reti neurali artificiali e data-driven, grazie alla capacità di tali modelli di imparare autonomamente dai dati quali siano le migliori feature da estrarre. Questi modelli vengono generalmente addestrati in modo supervisionato su dataset cosiddetti etichettati, ovvero con immagini per le quali è nota e disponibile a priori la classificazione in difetto o meno. Sotto opportune condizioni questi algoritmi sono in grado di generalizzare quanto appreso e quindi di riconoscere e caratterizzare i difetti anche quando si richiede di elaborare immagini nuove (in linea) mai viste in fase di addestramento. Tale caratteristica è particolarmente importante in applicazioni, come il CND di pelli, nelle quali la variabilità intrinseca del materiale, di origine naturale, rende estremamente complesso costruire una casistica esaustiva delle tipologie di difetti e delle loro possibili manifestazioni: in tal caso, disporre di algoritmi in grado di costruire in modo autonomo delle rappresentazioni sufficientemente generali tanto del materiale privo di difetti che delle diverse classi di anomalie costituisce un potente strumento per la soluzione di problemi di CND.
In conclusione, le tecniche ottiche interferometriche, e più in generale di computer vision, sono adatte per ispezioni veloci e si prestano a rispondere molto bene alle future tendente delle tecnologie dei CND che vedranno nei prossimi anni lo sviluppo di controlli non distruttivi automatizzati grazie all’utilizzo sempre più diffuso dell’intelligenza artificiale (deep learning) e dei robot. Di questi sviluppi tecnologici potrà sicuramente beneficiare anche l’industria conciaria e la filiera di produzione per raggiungere sempre più elevati standard di qualità e funzionalità dei prodotti che utilizzano pelli.
Vuoi ricevere la copia di CPMC? Iscriviti QUI per leggere la rivista ufficiale della Stazione Pelli e non perderti i prossimi numeri.


L’innovazione tecnologica e la ricerca scientifica
31◊ Letture presso la Biblioteca della Stazione Sperimentale Pelli ◊ Autore: Professore Luigi Nicolais, Consigliere scientifico…

La dignita’ del lavoro: pilastro del manifatturiero italiano
◊ Letture presso la Biblioteca della Stazione Sperimentale Pelli ◊ Paolo Bastianiello, Presidente Comitato education di Sistema…
Rivista scientifica SLTC Journal marzo/aprile 2020
◊ Letture presso la Biblioteca della Stazione Sperimentale Pelli ◊ Cerchi informazioni su un termine,…
Libro: La pelle del design. Progettare la sensorialità
◊ Letture presso la Biblioteca della Stazione Sperimentale Pelli ◊ Libro: La pelle nel design…